ホビーロボットの底辺をミニ四駆レベルに引き下げる事を目標に、小型、軽量、安価、簡単なロボットに超戦中!
×
[PR]上記の広告は3ヶ月以上新規記事投稿のないブログに表示されています。新しい記事を書く事で広告が消えます。
何だかんだ言っといて、結局Nano-3が一番完成に近いので設計を終わらせました。
まあ、他のも設計は半分くらい終わってますけど。
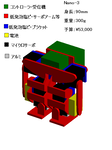
ひとまずこんな感じ。
実際には初代Nanoのイメージを失わないよう、無彩色のみで作ります。
というか、初代と同じく黒で統一・・・したいのですが、厚さ5mmの板が白しか無いのでそこは白で。
といっても、それも足の付け根の部分だけですので、結局はサーボホーンの白の方が目立ちます。
なお、図ではサーボホーンが省略れえています。
ロール軸は前、足のピッチ軸は内側、肩のピッチ軸は外側が出力軸です。
以上、相変わらずPNGが好きなごーすとでした。
まあ、他のも設計は半分くらい終わってますけど。
ひとまずこんな感じ。
実際には初代Nanoのイメージを失わないよう、無彩色のみで作ります。
というか、初代と同じく黒で統一・・・したいのですが、厚さ5mmの板が白しか無いのでそこは白で。
といっても、それも足の付け根の部分だけですので、結局はサーボホーンの白の方が目立ちます。
なお、図ではサーボホーンが省略れえています。
ロール軸は前、足のピッチ軸は内側、肩のピッチ軸は外側が出力軸です。
以上、相変わらずPNGが好きなごーすとでした。
PR
えー・・・
とりあえず、今後の方向性については色々と悩んでいます。
ひとつは、Whilの新型機。一番簡単に作れますが、今の環境では時間の確保が難しい状況。
一番の問題はRCB-3の入手。一気に金が飛ぶ学生には難しい事です。
しかし、そうでもしないと目標のサイズにおさまらないので・・・
それから、Nanoシリーズの作成。
Nano-3は設計もほぼ完了し、あとは3Dモデルをおこして最終確認のみ。
Nano-6は大まかな構想が決まった段階。細かい設計はまだまだこれからです。
どちらにせよ、RCB-1を使い、マイクロサーボを使います。
問題は加工精度。自室で電動工具無しでも加工できる素材を使いますが、逆に言えば電動工具が使えないほどやわい素材。
モデラ等は使えない上に精密加工が必要となる機体ですので、大変です。
一番どうにかなりそうなのが、以前から作りたかった人形っぽいロボット。
サーボも半分くらい使いまわし可能な上に、RCB-1が1枚で十分なのでお財布にもやさしいです。
リンクの使用も無ければ極限まで積めた場所も無い、加工精度が悪くても歩ける機体です。
そして、裁縫も得意なので衣装の作成も苦にならないはず。
さて、これでどの機体を作りましょうかね?
一番作りたい機体はNano-3で、もうサーボと受信機の採寸も済んでいます。
サーボも採寸のために1個買ってますし・・・
完成したら、タカラトミーのキットを大幅に下回る世界最小の機体(9cm)に・・・
いや、レギュレーションとか無視したら世界最小の2足歩行ロボットはNano(6cm)でした。
そして、Nano-6は究極の3cmの機体ですので、焦らなくても自然と世界最小記録は私の物に・・・?
こんな事を書くと、また誰かが本気になったり・・・ならないか。
とりあえず、今後の方向性については色々と悩んでいます。
ひとつは、Whilの新型機。一番簡単に作れますが、今の環境では時間の確保が難しい状況。
一番の問題はRCB-3の入手。一気に金が飛ぶ学生には難しい事です。
しかし、そうでもしないと目標のサイズにおさまらないので・・・
それから、Nanoシリーズの作成。
Nano-3は設計もほぼ完了し、あとは3Dモデルをおこして最終確認のみ。
Nano-6は大まかな構想が決まった段階。細かい設計はまだまだこれからです。
どちらにせよ、RCB-1を使い、マイクロサーボを使います。
問題は加工精度。自室で電動工具無しでも加工できる素材を使いますが、逆に言えば電動工具が使えないほどやわい素材。
モデラ等は使えない上に精密加工が必要となる機体ですので、大変です。
一番どうにかなりそうなのが、以前から作りたかった人形っぽいロボット。
サーボも半分くらい使いまわし可能な上に、RCB-1が1枚で十分なのでお財布にもやさしいです。
リンクの使用も無ければ極限まで積めた場所も無い、加工精度が悪くても歩ける機体です。
そして、裁縫も得意なので衣装の作成も苦にならないはず。
さて、これでどの機体を作りましょうかね?
一番作りたい機体はNano-3で、もうサーボと受信機の採寸も済んでいます。
サーボも採寸のために1個買ってますし・・・
完成したら、タカラトミーのキットを大幅に下回る世界最小の機体(9cm)に・・・
いや、レギュレーションとか無視したら世界最小の2足歩行ロボットはNano(6cm)でした。
そして、Nano-6は究極の3cmの機体ですので、焦らなくても自然と世界最小記録は私の物に・・・?
こんな事を書くと、また誰かが本気になったり・・・ならないか。
レポっつうか、自分の戦績の記録みたいな感じ。
・ダッシュ
まあ、事前に予想していたのである程度修正したのですが・・・
滑る、滑る、左右にぶれる!オクタゴンリングより本番の方が滑る!
結果としては1:16と、チビ助に置いて行かれる羽目に・・・
脚の長さ20cmはあるのにぃ~・・・
・ボトルトラクション
これはWhilを信じ、1本で挑戦!はい、信じても1本しか積みません。
結果としては1mに満たない程度。まあ、こればかりは全然期待していませんでしたので、いいですが・・・
やはり滑りまくりなのが問題でした。
・サイコロシュート
ここで対戦相手がマヌイに。
基本モーション以外は下段パンチしか無いので、スカートのマヌイには使えない。
よって、まともにサイコロを押して戦う事に。
結果としてはシュート1回で5の目が出ましたので5点。
いや、真正面から押しても効果が無かったので、横に逃げたらたまたま上手くいったんです。
その後、サイコロの押し合いでWhilは今回唯一の転倒。
・キューブ
「無理です!キューブに重量負けします!」
いや、マジで先週からわかっていましたが、本当にその通り。
組み合わせは・・・体が2つに折れるロボット2台に改造ノバ。
相手には6軸で歩くロボット2台に普通の。
で、負けました。有線ロボット同士、いや、オペレーター同士が場所を入れ替えるという厄介なイベントまでありました。
・ランブル
しゃがんでいたらキューブでの仲間、あいぼーに落とされた。
そんな感じです。
結果は30位。今回のWhilでこれは相当いい結果です。
今度目指すとしたら20位かな?どうにかほどよくグリップきかせて横移動を安定化させて。
とりあえず、Nano-3での参加も検討しているので、もしかしたらまた今回位かもしれません。
ただ、Nano-3は工夫すればグリップ足でもいけるので、キューブを押せます。
それでどう変わるのか・・・ それが問題ですね。
あ、さらに予算があればWhilの新型機も作れますから・・・
ん~悩むなぁ~・・・
・ダッシュ
まあ、事前に予想していたのである程度修正したのですが・・・
滑る、滑る、左右にぶれる!オクタゴンリングより本番の方が滑る!
結果としては1:16と、チビ助に置いて行かれる羽目に・・・
脚の長さ20cmはあるのにぃ~・・・
・ボトルトラクション
これはWhilを信じ、1本で挑戦!はい、信じても1本しか積みません。
結果としては1mに満たない程度。まあ、こればかりは全然期待していませんでしたので、いいですが・・・
やはり滑りまくりなのが問題でした。
・サイコロシュート
ここで対戦相手がマヌイに。
基本モーション以外は下段パンチしか無いので、スカートのマヌイには使えない。
よって、まともにサイコロを押して戦う事に。
結果としてはシュート1回で5の目が出ましたので5点。
いや、真正面から押しても効果が無かったので、横に逃げたらたまたま上手くいったんです。
その後、サイコロの押し合いでWhilは今回唯一の転倒。
・キューブ
「無理です!キューブに重量負けします!」
いや、マジで先週からわかっていましたが、本当にその通り。
組み合わせは・・・体が2つに折れるロボット2台に改造ノバ。
相手には6軸で歩くロボット2台に普通の。
で、負けました。有線ロボット同士、いや、オペレーター同士が場所を入れ替えるという厄介なイベントまでありました。
・ランブル
しゃがんでいたらキューブでの仲間、あいぼーに落とされた。
そんな感じです。
結果は30位。今回のWhilでこれは相当いい結果です。
今度目指すとしたら20位かな?どうにかほどよくグリップきかせて横移動を安定化させて。
とりあえず、Nano-3での参加も検討しているので、もしかしたらまた今回位かもしれません。
ただ、Nano-3は工夫すればグリップ足でもいけるので、キューブを押せます。
それでどう変わるのか・・・ それが問題ですね。
あ、さらに予算があればWhilの新型機も作れますから・・・
ん~悩むなぁ~・・・
わんだほー行って来ました。
先週初めてキューブを見た時の予想が的中しました。
130gに満たないキューブに重量負け。
いや、正確には摩擦抵抗のせいで動けなかったんですけどね。
まあ、でも今回のWhilはある意味成功でした。
小さいので、余分なモーション無しでもある程度まではいける。
しかも、無駄に安定性がある。転んだのはサイコロシュートでカイン技師さんのマヌイに倒された1回だけ。
おまけに、前用の起き上がりモーションで後ろから起き上がれた。
そして、脅威の4足歩行モード!! いや、歩きませんですけどね。
それにしても、まさかランブルですぐ横にいた某氏に落とされたのは非常に残念です。
しゃがんでいればもしかしたらばれないかも。とか思っていたら、すぐ目の前にいた人にはばればれ。
しかも、予想以上に強いロボットがばらけてしまい、まさかのアリウスと同じパネルから。
そして、左に大きなロボット、右に市販キット2台。こりゃ無理かと。
さて、結果としてはラチェットドライバーをもらえたので良かったです。
しかし、この間のチロル大会同様、修正点が目立ちました。
何より、本番でまっすぐ進めずに時間をそうとう無駄にした事。
板金しなおしてもっと精度を上げないと話になりません。
まさか、最も自信のあったダッシュで1分以上かかるとは・・・
そして、まだまだ問題山積み。
キューブに負けない事。無線化。軸数の調整。
マヌイに対して失礼な下段攻撃以外にも何か使えるようになる事。
まあ、そんな問題だらけのマシンですが、ばらさずにもうしばらく取っておこうかと思います。
なにしろ、現段階での可動機はWhilだけですし、それにNano-3は今のサーボとコントローラは不要。
はい。Nano-3をついに作る気でいるんです。
で、Whilを取っておく1番の理由。
マヌイに倒されたから。
はい。可愛いものに目が無いのは昔からです。
もしもサイコロシュートの相手がシロ助だったとしたら、勝ちを譲っていた可能性も・・・
いや、マヌイでもそうとう迷いましたが。
ちなみに、チビ助は微妙にツボから外れました。むしろ、かっこ良かったです。
あ、最後の集合写真ですが、ちゃっかりキノピイの横を占拠しました。
よく考えたら、あそこはマヌイに譲るべきだった・・・?
ちょうどマヌイとキノピイのツーショット逃してたし・・・
先週初めてキューブを見た時の予想が的中しました。
130gに満たないキューブに重量負け。
いや、正確には摩擦抵抗のせいで動けなかったんですけどね。
まあ、でも今回のWhilはある意味成功でした。
小さいので、余分なモーション無しでもある程度まではいける。
しかも、無駄に安定性がある。転んだのはサイコロシュートでカイン技師さんのマヌイに倒された1回だけ。
おまけに、前用の起き上がりモーションで後ろから起き上がれた。
そして、脅威の4足歩行モード!! いや、歩きませんですけどね。
それにしても、まさかランブルですぐ横にいた某氏に落とされたのは非常に残念です。
しゃがんでいればもしかしたらばれないかも。とか思っていたら、すぐ目の前にいた人にはばればれ。
しかも、予想以上に強いロボットがばらけてしまい、まさかのアリウスと同じパネルから。
そして、左に大きなロボット、右に市販キット2台。こりゃ無理かと。
さて、結果としてはラチェットドライバーをもらえたので良かったです。
しかし、この間のチロル大会同様、修正点が目立ちました。
何より、本番でまっすぐ進めずに時間をそうとう無駄にした事。
板金しなおしてもっと精度を上げないと話になりません。
まさか、最も自信のあったダッシュで1分以上かかるとは・・・
そして、まだまだ問題山積み。
キューブに負けない事。無線化。軸数の調整。
マヌイに対して失礼な下段攻撃以外にも何か使えるようになる事。
まあ、そんな問題だらけのマシンですが、ばらさずにもうしばらく取っておこうかと思います。
なにしろ、現段階での可動機はWhilだけですし、それにNano-3は今のサーボとコントローラは不要。
はい。Nano-3をついに作る気でいるんです。
で、Whilを取っておく1番の理由。
マヌイに倒されたから。
はい。可愛いものに目が無いのは昔からです。
もしもサイコロシュートの相手がシロ助だったとしたら、勝ちを譲っていた可能性も・・・
いや、マヌイでもそうとう迷いましたが。
ちなみに、チビ助は微妙にツボから外れました。むしろ、かっこ良かったです。
あ、最後の集合写真ですが、ちゃっかりキノピイの横を占拠しました。
よく考えたら、あそこはマヌイに譲るべきだった・・・?
ちょうどマヌイとキノピイのツーショット逃してたし・・・
今日はわんだほー当日!
そんな訳で、9時ごろに出発します。
多分、買い物を済ませるとちょうどいい時間ではないかと思います。
で、昨日はページを新しいユーザーの方に切り替えるために削除。
そうしたら、なぜか元のアドレスで登録できず。
しかも、わんだほーのページにリンクがあるのを思い出し、慌てて別のアドレスで作り直し。
で、もちろん連絡しましたとも。
あー、こうなるともうリンク先に直接連絡に行かないと・・・
そんな訳で、9時ごろに出発します。
多分、買い物を済ませるとちょうどいい時間ではないかと思います。
で、昨日はページを新しいユーザーの方に切り替えるために削除。
そうしたら、なぜか元のアドレスで登録できず。
しかも、わんだほーのページにリンクがあるのを思い出し、慌てて別のアドレスで作り直し。
で、もちろん連絡しましたとも。
あー、こうなるともうリンク先に直接連絡に行かないと・・・